ROS Navigation stack
This section is specific to the ROS navigation stack.
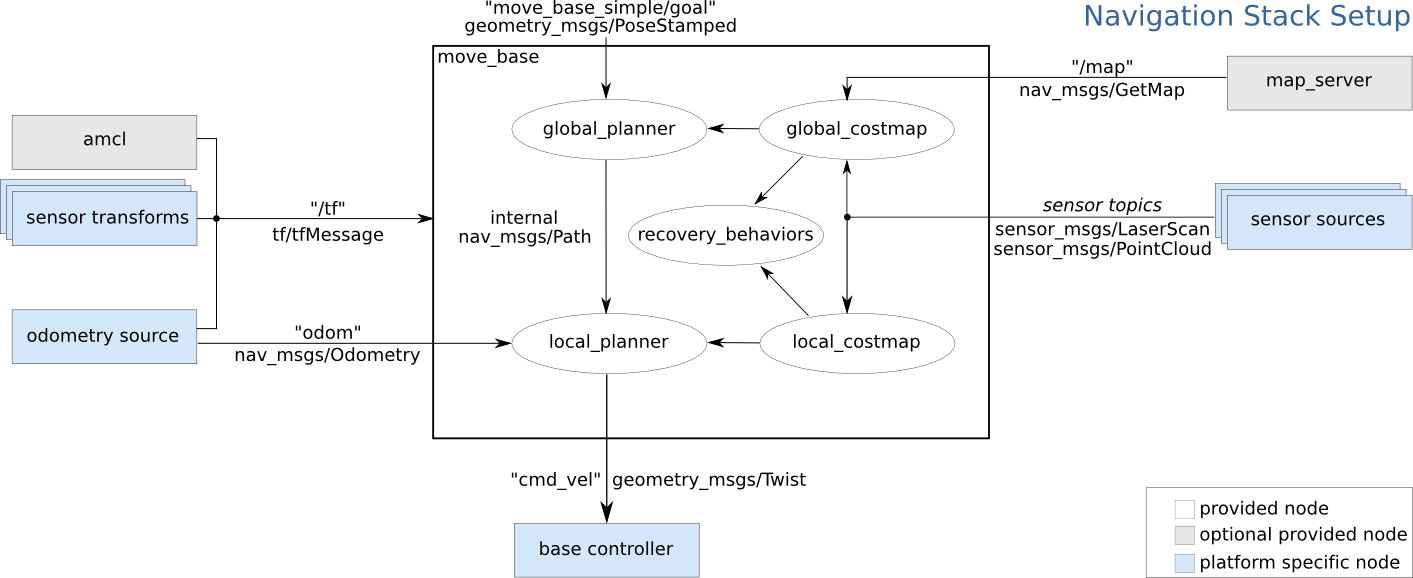
We will start at the bottom of the navigation tree operations. First lets clear up something that can be confusing to people, global vs local.
When we are talking about global we are talking about the entire known environment but local is limited to some range. For example, when we are walking around we have a mental map of the world and that would be our global map, but the map of what we are see and trying to avoid now is out local map.