move_base
Move base is a package that will actaully move the robot to try and meet some "goal". All interation with move_base is done using the actionlib system, ROS messages can also be used but this is far less common.
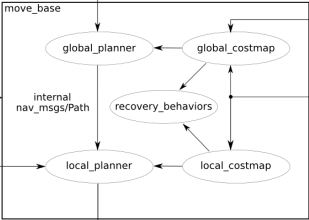
As can be seen in the figure above, move_base operates using several other systems to try and reach its goal. An over view of these are:
- global_costmap: This is the cost map of the entire world that will include previous map data. This data could coming in from map_server.
- local_costmap: This is the cost map that is being build in the fly from sensor data only. It is what the system will use to avoid new obstacles such as a person walking in the way.
- global_planner: This is the path planning system that work on the global cost map. It will build a path plan based on the entire world.
- local_planner : The local planner will build a path plan based on its local cost map and the plan build from the global planer. This way the system can handle looking at the entire map and also respond to any sudden environment changes.
- recovery_behaviors: This system is set up to run if something goes wrong, such as one of the cost maps cant figure out what to do.
